|
|
||
04/19/04 |
|
|
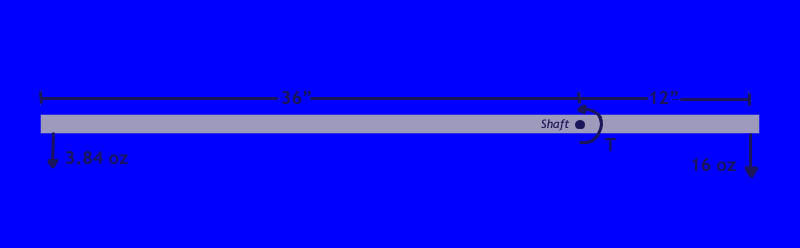
Calculation of the amount of torque needed:
For this ideal calculation, we will neglect the weight of the lever arm, which would create a positive couple; we will also neglect the friction of the weight sliding on the pole, which would create a negative couple. ΣM/shaft = T + 3.84 oz ∙ 36 in – 16 oz ∙ 12 in = 0 T = 53.76 oz-in Since the servo is geared 1:2, we can expect the servo to apply a maximum of 92 oz-in, we only need about 60% of the servo's available output.
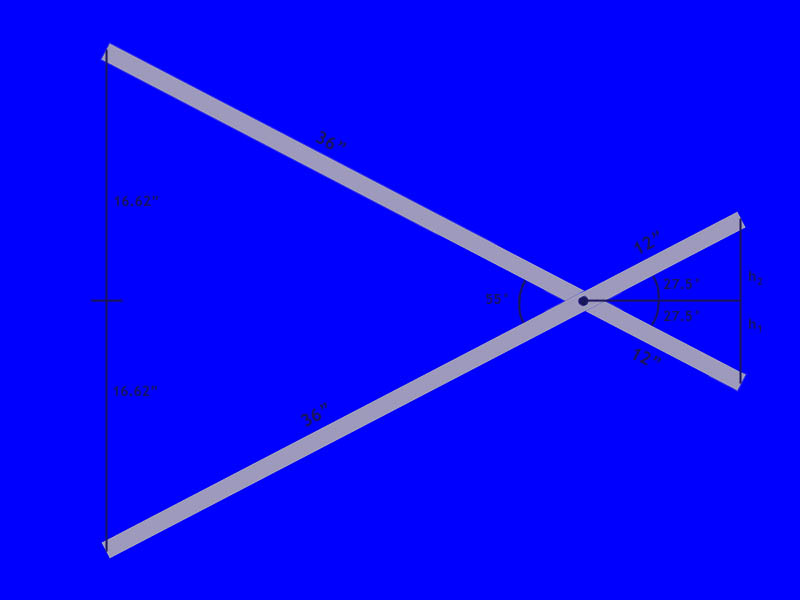
Calculation of maximum theoretical lifting height:
This is assuming that the servo will rotate the observed 110° of rotation, as well as a frictionless operation. Total lifting height: H = h1 + h2 H = 12" ∙ sin(27.5°) + 12" ∙ sin(27.5°) H = 11.1" Thus, the theoretical lift height is 11.1". We only lifted 8.5", which is 77% of the theoretical value.
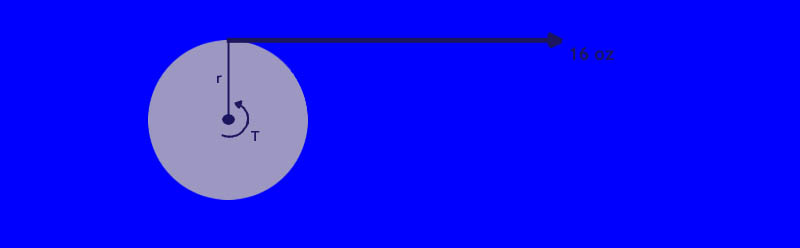
Relation to maximum energy output of servo:
The servo, in its original 1:1 gearing, has a maximum torque of 46 oz-in; so if the servo is attached to a disk of radius r (see image) which could just rotate about its axis, it would be operating at its maximum. ΣM/C = T - 16 oz ∙ r r = 2.875" This system could raise the 16 oz weight a maximum of 7.02 in. Actual lift distance: 8.5" Counterweight actual vertical distance: 8.5" ∙ 36" ÷ 12" = 25.5" We were able to lift a higher distance than the theorized 7.02 inches because we are using the potential energy of a 3.84 oz counterweight and lowering it 25.5". Thus, Eours ÷ Emax = [16 oz ∙ 8.5" - 3.84 oz ∙ 25.5"] ÷ [16 oz ∙ 7.02"] = 33.9 % This means that we are only using approximately 34% of the maximum energy of the servo.
Next: Features
This site was last updated 04/19/04 |